Rotation of a vector in Python
N
Los Angeles
If you want to rotate a 3D vector around a particular axis, take advantage of matrix transformations instead of element wise (like you have written above). Below is code to rotate a 3-D vector around any axis:
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
def unit_vector(vector):
""" Returns the unit vector of the vector."""
return vector / np.linalg.norm(vector)
def angle_between(v1, v2):
"""Finds angle between two vectors"""
v1_u = unit_vector(v1)
v2_u = unit_vector(v2)
return np.arccos(np.clip(np.dot(v1_u, v2_u), -1.0, 1.0))
def x_rotation(vector,theta):
"""Rotates 3-D vector around x-axis"""
R = np.array([[1,0,0],[0,np.cos(theta),-np.sin(theta)],[0, np.sin(theta), np.cos(theta)]])
return np.dot(R,vector)
def y_rotation(vector,theta):
"""Rotates 3-D vector around y-axis"""
R = np.array([[np.cos(theta),0,np.sin(theta)],[0,1,0],[-np.sin(theta), 0, np.cos(theta)]])
return np.dot(R,vector)
def z_rotation(vector,theta):
"""Rotates 3-D vector around z-axis"""
R = np.array([[np.cos(theta), -np.sin(theta),0],[np.sin(theta), np.cos(theta),0],[0,0,1]])
return np.dot(R,vector)
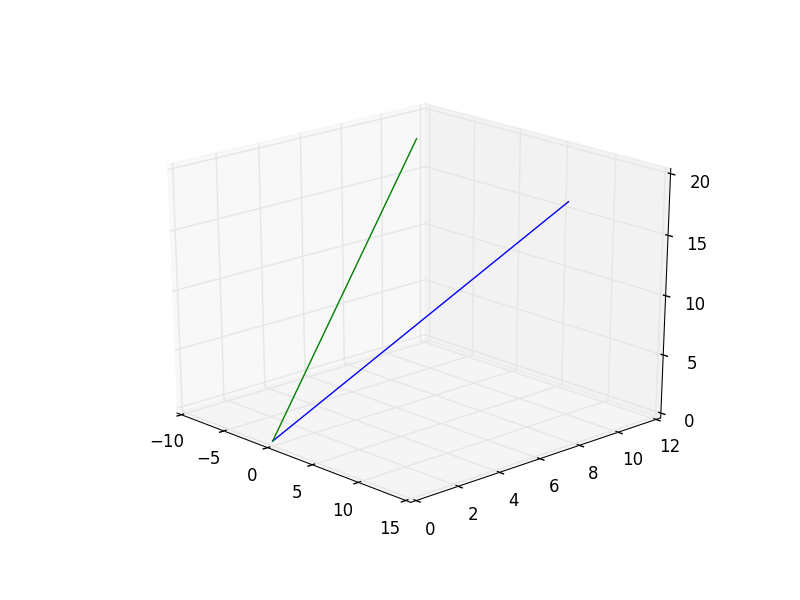
Rotate Blue Vector 45 degrees (pi/2)
L_predef = np.array([11.231303753070549, 9.27144871768164, 18.085790226916288]) #blue vector
new_vect = z_rotation(L_predef, np.pi/2.0)
fig = plt.figure()
ax = fig.gca(projection='3d')
ax.plot(np.linspace(0,L_predef[0]),np.linspace(0,L_predef[1]),np.linspace(0,L_predef[2]))
ax.plot(np.linspace(0,new_vect[0]),np.linspace(0,new_vect[1]),np.linspace(0,new_vect[2]))
plt.show()